
10GHz improvements
May 21, 2025
Over the last couple of weeks, whilst waiting for moon conditions to improve, I took the opportunity to tackle a few issues.
Frequency accuracy
I use an Icom IC-705 at 432MHz as the IF radio. To measure frequency accuracy I used WSJT-X in freqCal mode and harmonics from a Leo Bodnar GPSDO running at 10MHz fed through a 120dB attenuator. I also used the GB3VHF and GB3UHF beacons which can be copied at my QTH on a rubber duck antenna indoors.
| Frequency MHz | Difference Hz | Notes |
|---|---|---|
| 10 | + 1.7 | |
| 50 | + 8.4 | 5th harmonic |
| 150 | + 25.3 | 15th harmonic |
| 430 | +73.2 | 43rd harmonic |
| 144.430 | +25 | GB3VHF |
| 432.430 | +78.4 | GB3UHF |
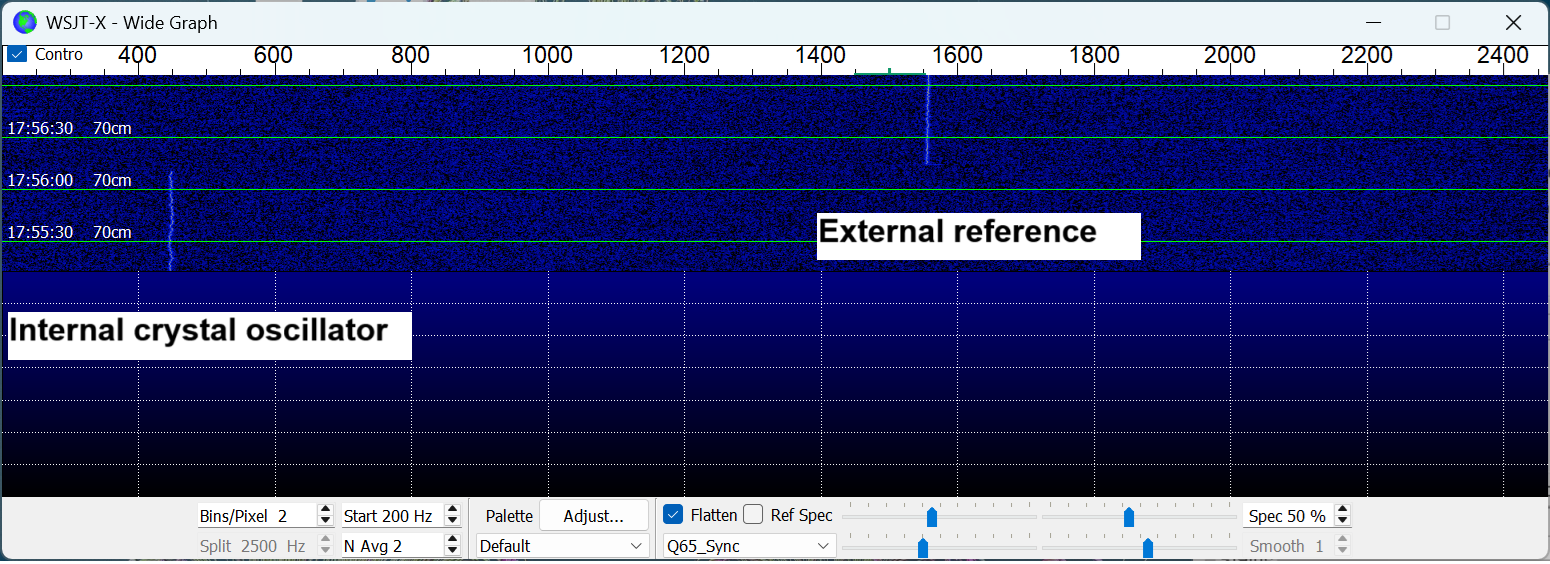
I then tested the Kuhne MKU 10 G5 transverter to compare the built in crystal oscillator with an external 10MHz reference. Harmonics at 10GHz were generated from a Leo Bodnar GPSDO at around 691MHz. With the internal crystal oscillator the transverter is over 1kHz low and approximately 50Hz high when the external 10MHz reference is connected.
The internal crystal oscillator can be tweaked but I haven’t tried this yet as I cannot get to the pot without removing the transverter from the feed tray.
To improve things further I used the REF Adjust function (Menu > Set > Function > REF Adjust) on the IC-705 and now frequency accuracy is better than 15Hz when converting down from 10GHz.
| Frequency MHz | Difference Hz | Notes |
|---|---|---|
| 691.213333 x 15 = 10368.199 | + 4 | 15th harmonic |
| 691.202000 x 15 = 10368.300 | + 9 | 15th harmonic |
| 691.201665 x 15 = 10368.025 | + 15 | 15th harmonic |
| 797.553842 x 13 = 10368.199 | + 6 | 13th harmonic |
Dish positioner
To help with dish calibration I’ve added a small fixing to the rear of the dish to attach a laser pointer to. When the dish is parked the laser should point to a specific position marked on the garage wall and I can quickly tell if it needs recalibration.
Sequencer
The Arduino sequencer does not always detect the correct waveguide switch position so I added external pull up resistors to the relevant input pins.