

10 GHz update - May 2026
I finished building and testing the 10 GHz 25 W GaN PA at the end of February and installed it at the dish on 2 March. My first QSO was with ON5TA -16/-17, followed by OZ1LPR -2/-16, GW3KTH -19/-22 and IW2FZR -16/-18.
{kind=link}
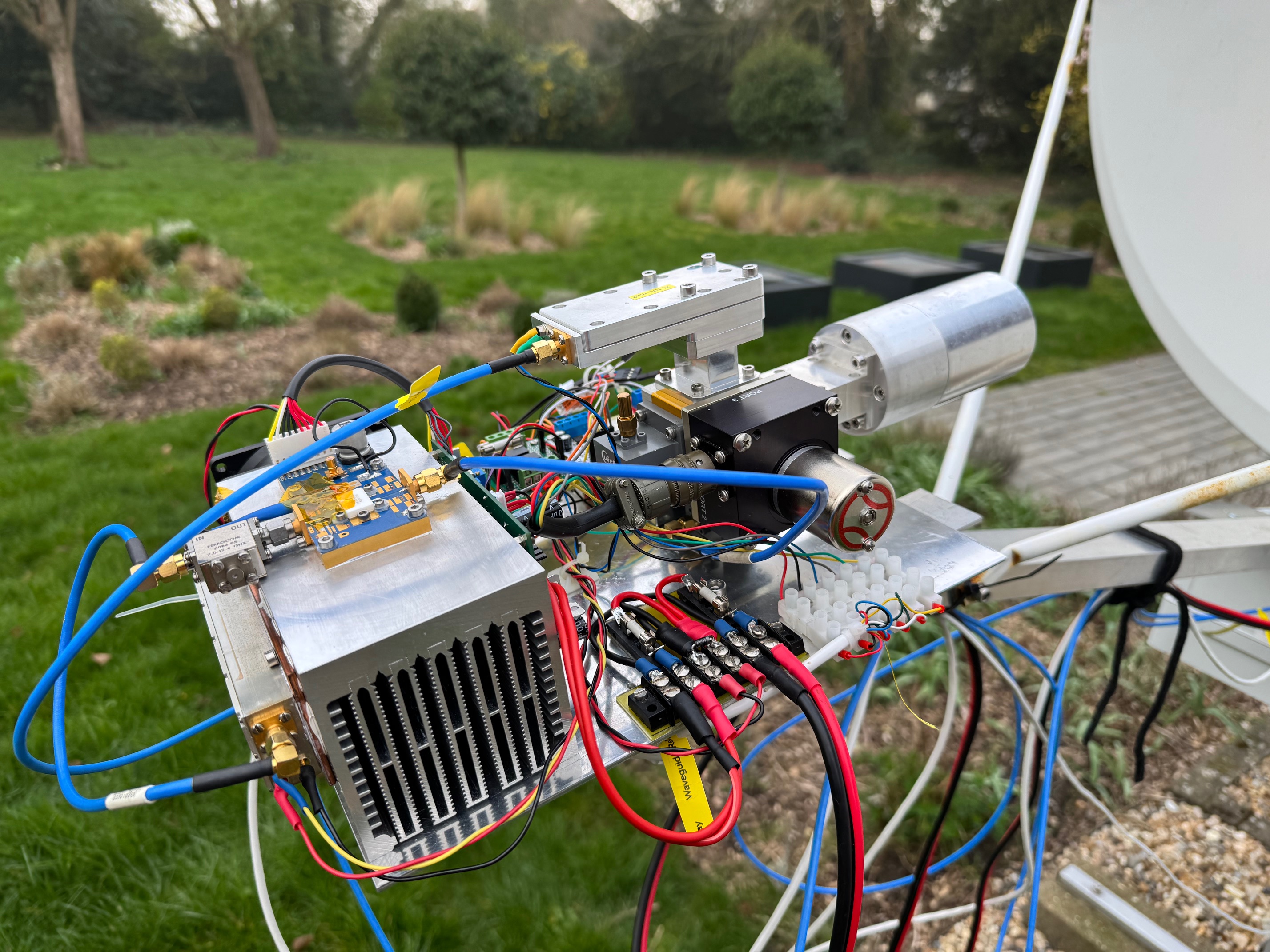
10 GHz 25 W GaN power amplifier
Good results had previously been achieved on 10 GHz EME using 10–12 W into a 1.2 m dish. Over the winter period, the decision was made to increase transmit power to approximately 25 W by constructing a higher-power amplifier stage.
With no prior experience in building RF power amplifiers at microwave frequencies, a substantial amount of time was spent reviewing published designs, conference proceedings, application notes and device data sheets. Detailed notes and test results were maintained throughout, helping to identify problems and make appropriate modifications.
10GHz update - December 2025
I haven’t been active on 10GHz since the end of August, when I moved the dish to the front garden where I have more moon visibility to the west.
During October and November I moved the transverter and SMPS for the PA from the feedtray into a separate unit which is located under the the feedarm, close to the dish. I also made up some new feedarm supports for the dish as the previous ones were a bit short.
ARRL EME Contest - August 2025
During the ARRL EME contest I completed 15 QSO’s on 10GHz, including 6 initials. I was very pleased to work ON4CDU, my first 1.2m dish QSO. Being able to peak the dish on moon noise using the new nudge switches was extremely useful and I consistently saw 0.5 - 0.7dB of moon noise.
10GHz update - August 2025
KN3G controller
The combination of the KN3G controller and slew drive have been working well but occasionally I need to peak the dish on sun or moon noise. When I built the controller I didn’t use any manual switches - all of the main functions I need are available through the Nextion touch display.
First 10GHz EME QSOs
After a few failed attempts early last month, a combination of good moon conditions and fine, dry weather towards the end of May/early June helped to complete my first 10GHz EME QSOs.
On 22 May I completed my first ever 10GHz EME QSO with OZ1FF -13/-20, followed by ON5TA -12/-15, F6BKB -15/-18 on 23 May, and ON5TA -16/-19, G4YTL -16/-22 on 25 May.
10GHz improvements
Over the last couple of weeks, whilst waiting for moon conditions to improve, I took the opportunity to tackle a few issues.
Frequency accuracy
I use an Icom IC-705 at 432MHz as the IF radio. To measure frequency accuracy I used WSJT-X in freqCal mode and harmonics from a Leo Bodnar GPSDO running at 10MHz fed through a 120dB attenuator. I also used the GB3VHF and GB3UHF beacons which can be copied at my QTH on a rubber duck antenna indoors.
1.2m offset dish
In March I started looking for a 1.2m fibreglass dish as it was evident that the steel dish I was using for 10GHz would not be able to handle the extra weight of the SSPA and power supply mounted at the feed point. After making a few enquiries I found a Prodelin 1132 1.2m offset dish together with a feed arm. I also decided to change the lightweight patio stand used to mount the slew drive and dish for a stronger mount.
10GHz moon tracking tests
It’s been cold and bright for the last few days with good moon conditions so I setup the slew drive and dish outside to test moon tracking with the KN3G controller.
The first day was a bit frustrating. It took me a long time to get the dish pointed accurately at the sun and after calibrating azimuth and elevation I kept using the EEPROM Init button instead of the new EEPROM Save button that I had added. Eventually I got things working correctly and managed to track the moon for a while, receiving the DL0SHF beacon between -7dB and -13dB. A problem with my laptop charger meant that I had to stop tests earlier than planned.
KN3G rotator controller - bench tests
I eventually got round to putting the KN3G controller into a case and have now completed some more bench tests. The controller has been configured with GPS, sun and moon tracking options so that once the Arduino sketch has been loaded it runs as a standalone unit, without the need for a PC or laptop. An unshielded 4 core cable is used for the motors and CAT8 S/FTP for the Hall sensor power and output. The cables are 15m long and so far I haven’t experienced any issues with detecting pulses.